Keywords: bayesian | regression | normal-normal model | bayesian updating | conjugate prior | Download Notebook
Contents
Contents
%matplotlib inline
import numpy as np
import scipy as sp
import matplotlib as mpl
import matplotlib.cm as cm
import matplotlib.pyplot as plt
import pandas as pd
pd.set_option('display.width', 500)
pd.set_option('display.max_columns', 100)
pd.set_option('display.notebook_repr_html', True)
import seaborn as sns
sns.set_style("whitegrid")
sns.set_context("poster")
from scipy.stats import norm
from scipy.stats import multivariate_normal
def cplot(f, ax=None):
if not ax:
plt.figure(figsize=(4,4))
ax=plt.gca()
xx,yy=np.mgrid[-1:1:.01,-1:1:.01]
pos = np.empty(xx.shape + (2,))
pos[:, :, 0] = xx
pos[:, :, 1] = yy
ax.contourf(xx, yy, f(pos))
#data = [x, y]
return ax
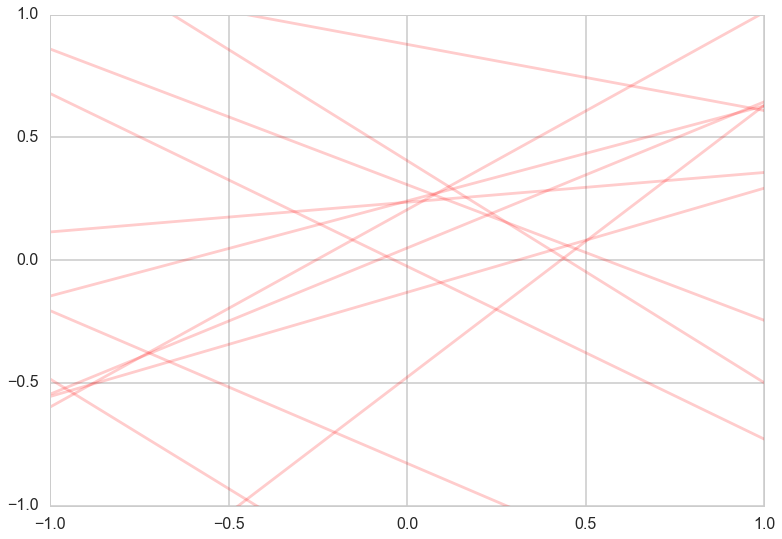
def plotSampleLines(mu, sigma, numberOfLines, dataPoints=None, ax=None):
#Plot the specified number of lines of the form y = w0 + w1*x in [-1,1]x[-1,1] by
# drawing w0, w1 from a bivariate normal distribution with specified values
# for mu = mean and sigma = covariance Matrix. Also plot the data points as
# blue circles.
#print "datap",dataPoints
if not ax:
plt.figure()
ax=plt.gca()
for i in range(numberOfLines):
w = np.random.multivariate_normal(mu,sigma)
func = lambda x: w[0] + w[1]*x
xx=np.array([-1,1])
ax.plot(xx,func(xx),'r', alpha=0.2)
if dataPoints:
ax.scatter(dataPoints[0],dataPoints[1])
ax.set_xlim([-1,1])
ax.set_ylim([-1,1])
The Bayesian formulation of regression
Let us say we have data $D$, of $n$ observations
$D=\left{ ({\bf x}_1, y_1), ({\bf x}_2,y_2), \ldots, ({\bf x}_n, y_n) \right} $ where ${\bf x}$
denotes an input vector of dimension $D$ and $y$ denotes a scalar output (dependent variable).
All data points are combined into a $D \times n$ matrix $X$.
The model that determines the relationship between inputs and
output is given by
where ${\bf w}$ is a vector of parameters of the linear model. Usually there is a bias or offset is included, but for now we ignore it.
We assume that the additive noise $\epsilon$ is iid Gaussian with zero mean and variance $\sigma_n^2$
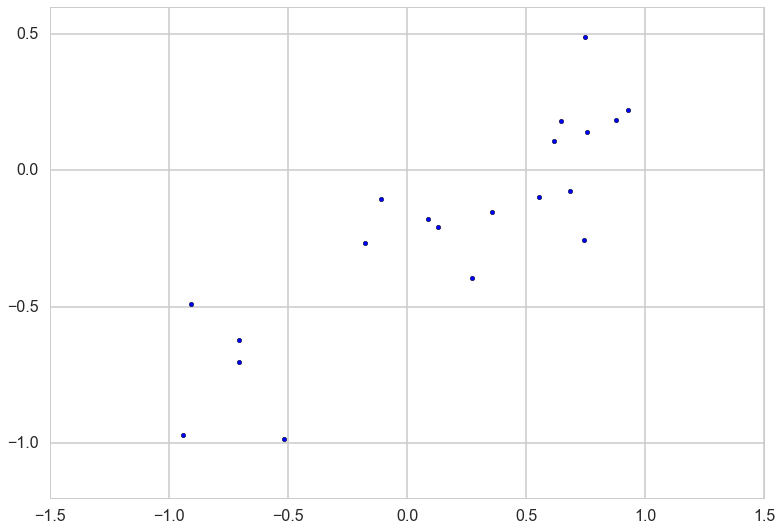
a0=-0.3
a1=0.5
N=20
noiseSD=0.2
u=np.random.rand(20)
x=2.*u -1.
def randnms(mu, sigma, n):
return sigma*np.random.randn(n) + mu
y=a0+a1*x+randnms(0.,noiseSD,N)
plt.scatter(x,y)
<matplotlib.collections.PathCollection at 0x11651dda0>
Likelihood
The likelihood is, because we assume independency, the product
| where $ | x | $ denotes the Euclidean length of vector $\bf x$. |
likelihoodSD = noiseSD # Assume the likelihood precision is known.
likelihoodPrecision = 1./(likelihoodSD*likelihoodSD)
Prior
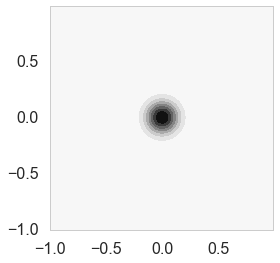
In the Bayesian framework inference we need to specify a prior over the parameters that expresses our belief about the parameters before we take any measurements. A wise choice is a ${\bf w_0}$ mean Gaussian with covariance matrix $\Sigma$
If we assume that $\Sigma$ is a diagonal covariance matrix then
priorMean = np.zeros(2)
priorPrecision=2.0
prior_covariance = lambda alpha: alpha*np.eye(2)#Covariance Matrix
priorCovariance = prior_covariance(1/priorPrecision )
priorPDF = lambda w: multivariate_normal.pdf(w,mean=priorMean,cov=priorCovariance)
priorPDF([1,2])
0.0021447551423913074
cplot(priorPDF);
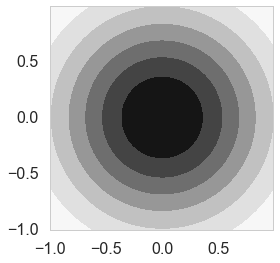
plotSampleLines(priorMean,priorCovariance,15)
Posterior
We can now continue with the standard Bayesian formalism
In the next step we `complete the square’ and obtain
\begin{equation} p(\bf w| \bf y,X) \propto \exp \left( -\frac{1}{2} (\bf w - \bar{\bf w})^T (\frac{1}{\sigma_n^2} X X^T + \Sigma^{-1})(\bf w - \bar{\bf w} ) \right) \end{equation}
This is a Gaussian with inverse-covariance
where the new mean is
To make predictions for a test case we average over all possible parameter predictive distribution values, weighted by their posterior probability. This is in contrast to non Bayesian schemes, where a single parameter is typically chosen by some criterion.
# Given the mean = priorMu and covarianceMatrix = priorSigma of a prior
# Gaussian distribution over regression parameters; observed data, x
# and y; and the likelihood precision, generate the posterior
# distribution, postW via Bayesian updating and return the updated values
# for mu and sigma. xtrain is a design matrix whose first column is the all
# ones vector.
def update(x,y,likelihoodPrecision,priorMu,priorCovariance):
postCovInv = np.linalg.inv(priorCovariance) + likelihoodPrecision*np.outer(x.T,x)
#The outer product looks wrong but when updating we need a 2x1 matrix while x is 1x2
postCovariance = np.linalg.inv(postCovInv)
postMu = np.dot(np.dot(postCovariance,np.linalg.inv(priorCovariance)),priorMu) + likelihoodPrecision*np.dot(postCovariance,np.outer(x.T,y)).flatten()
postW = lambda w: multivariate_normal.pdf(w,postMu,postCovariance)
return postW, postMu, postCovariance
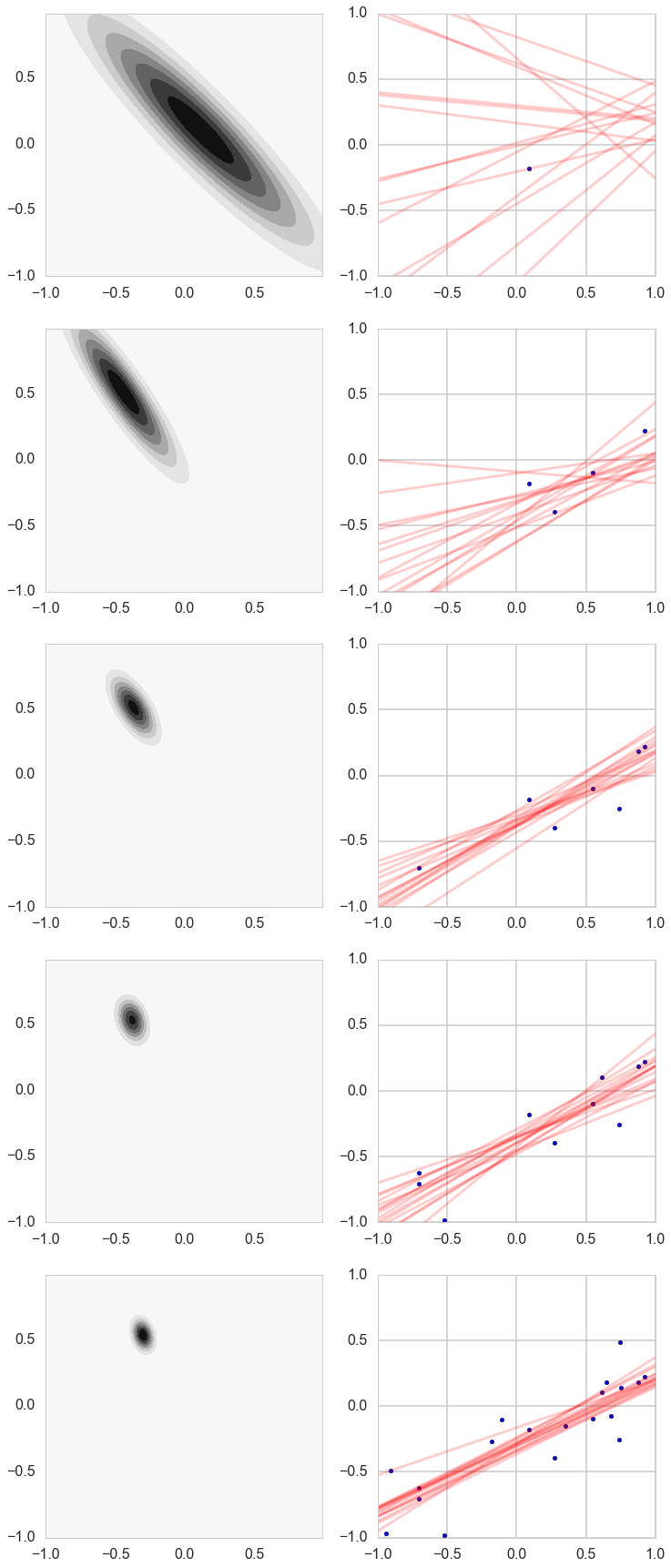
# For each iteration plot the
# posterior over the first i data points and sample lines whose
# parameters are drawn from the corresponding posterior.
fig, axes=plt.subplots(figsize=(12,30), nrows=5, ncols=2);
mu = priorMean
cov = priorCovariance
muhash={}
covhash={}
k=0
for i in [1,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16,17,18,19]:
postW,mu,cov = update(np.array([1,x[i]]),y[i],likelihoodPrecision,mu,cov)
muhash[i]=mu
covhash[i]=cov
if i in [1,4,7,10,19]:
cplot(postW, axes[k][0])
plotSampleLines(muhash[i],covhash[i],15, (x[0:i],y[0:i]), axes[k][1])
k=k+1
Posterior Predictive Distribution
Thus the predictive distribution at some $x^{*}$ is given by averaging the output of all possible linear models w.r.t. the posterior
$$
\begin{eqnarray}
p(y^{} | x^{}, {\bf x,y}) &=& \int p({\bf y}^{}| {\bf x}^{}, {\bf w} ) p(\bf w| X, y)dw \nonumber
&=& {\cal N} \left(y \vert \bar{\bf w}^{T}x^{}, \sigma_n^2 + x^{^T}A^{-1}x^{*} \right),
\end{eqnarray}
which is again Gaussian, with a mean given by the posterior mean multiplied by the test input and the variance is a quadratic form of the test input with the posterior covariance matrix, showing that the predictive uncertainties grow with the magnitude of the test input, as one would expect for a linear model.
Regularization
$\alpha = \sigma_n^2/\tau^2$ (prior precision/likelihood precision) is the regularization parameter from ridge regression. An uninformative (tending to uniform) prior means no regularization which is the standard MLE result.
priorPrecision/likelihoodPrecision
0.08000000000000002
But now say you had a strong belief the both the slope and intercept ought to be 0. Or in other words you are trying to restrict your parameters to a certain range.
priorPrecision=100.0
priorCovariance = prior_covariance(1/priorPrecision )
priorPDF = lambda w: multivariate_normal.pdf(w,mean=priorMean,cov=priorCovariance)
cplot(priorPDF)
<matplotlib.axes._subplots.AxesSubplot at 0x11959d198>
priorPrecision/likelihoodPrecision
4.000000000000001
choices=np.random.choice([1,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16,17,18,19],4,replace=False)
choices
array([8, 7, 2, 6])
# For each iteration plot the
# posterior over the first i data points and sample lines whose
# parameters are drawn from the corresponding posterior.
fig, axes=plt.subplots(figsize=(12,30), nrows=4, ncols=2);
mu = priorMean
cov = priorCovariance
muhash={}
covhash={}
k=0
xnew=x[choices]
ynew=y[choices]
for j,i in enumerate(choices):
postW,mu,cov = update(np.array([1,xnew[j]]),ynew[j],likelihoodPrecision,mu,cov)
muhash[i]=mu
covhash[i]=cov
cplot(postW, axes[k][0])
plotSampleLines(muhash[i],covhash[i],15, (xnew[:j+1],ynew[:j+1]), axes[k][1])
k=k+1
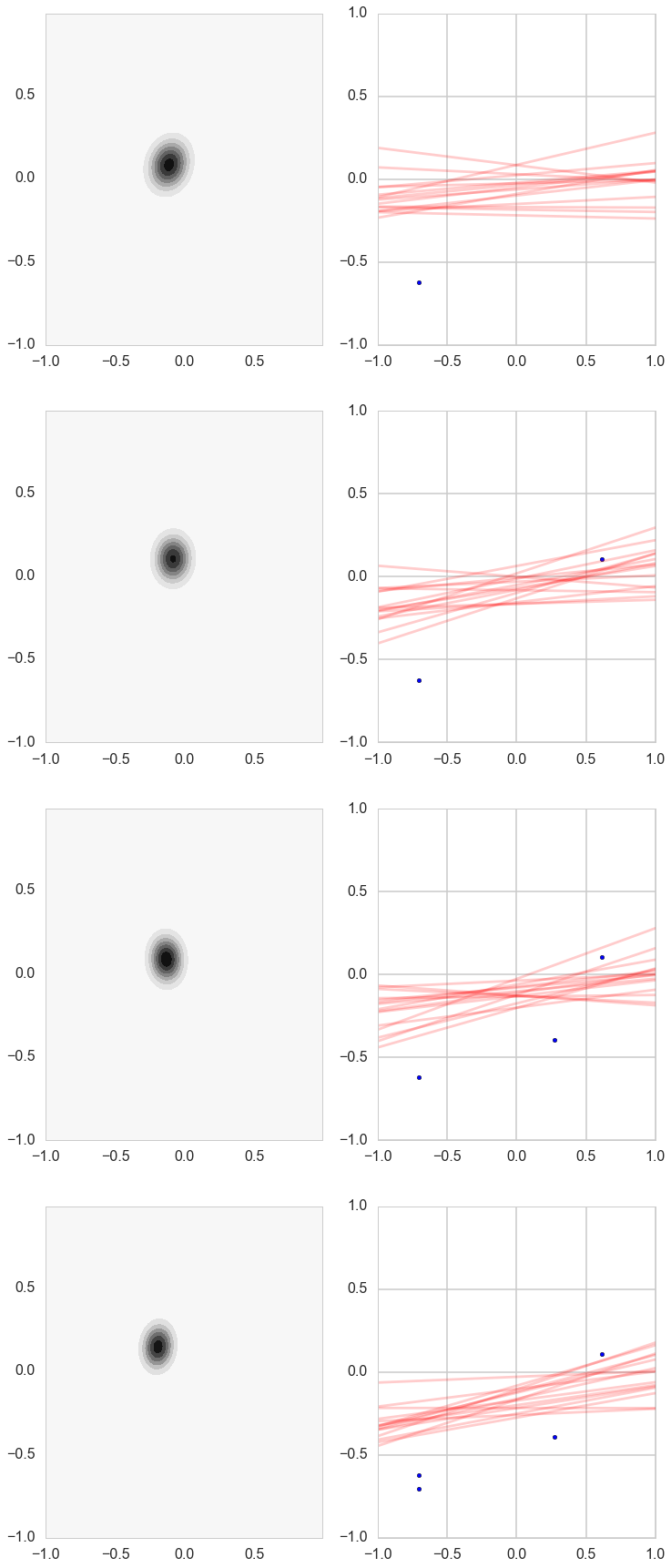
Notice how our prior tries to keep things as flat as possible!